CLOSE
About Elements
TANAKA is a leading company in the field of precious metals.
Advanced materials and solutions that support societal progress, the development stories behind them, the voices of engineers, and our management philosophy and vision—
Elements is an online media platform that shares insights that lead to a better society and a more prosperous future for the planet under the slogan “Mastering Precious Metals.”

A media platform by TANAKA
supporting societal progress with
advanced materials.






Search within Elements
Search by tags
Origami-inspired robot can gently turn pages and carry objects 16,000 times its weight
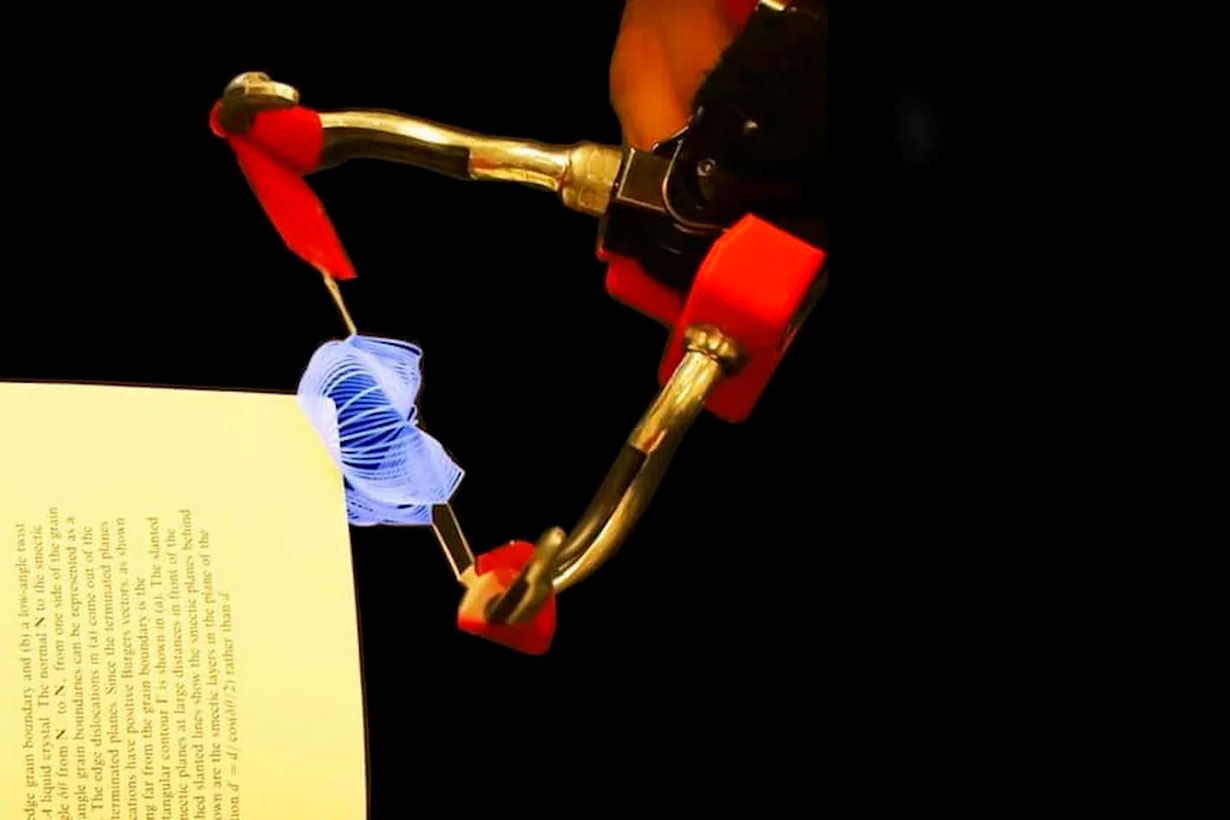
The new gripper is delicate enough to turn individual book pages. Top Image Credit: NC State
The Japanese art of paper cutting and folding known as kirigami has provided a wealth of inspiration for ingenious robotic designs, but the latest example might be the most versatile and impressive yet. As first detailed earlier this month in Nature Communications, a team at North Carolina State University recently developed a new soft robot gripper sensitive enough to handle water droplets and turn book pages, but strong enough to achieve a 16,000 payload-to-weight ratio. With additional refinements, engineers believe the gripper could find its way into a wide array of industries—as well as into human prosthetics.
“It is difficult to develop a single, soft gripper that is capable of handling ultrasoft, ultrathin, and heavy objects, due to tradeoffs between strength, precision and gentleness,” study author Jie Yin, an NC State associate professor of mechanical and aerospace engineering, said in a statement. “Our design achieves an excellent balance of these characteristics.”
[Related: Foldable robots with intricate transistors can squeeze into extreme situations.]
While previous soft grippers have been developed using elements of kirigami, the researchers’ tendril-like structures distribute their force in such a way as to be delicate and precise enough to help zip certain zippers and pick up coins. As New Scientist recently also noted, the shape and angling allows the 0.4 gram grippers to hold objects as heavy as 6.4 kilograms—a payload-to-weight ratio 2.5 times higher than the previous industry record.
Because the grippers’ abilities derive from their design and not the materials themselves, the team also showcased additional potential by building iterations from plant leaves. The potential for biodegradable grippers could prove extremely useful in situations where they are only temporarily necessary, such as handling dangerous medical waste like needles.
If all that weren’t enough, the NC State team went yet one step further by experimenting with attaching their grippers to a myoelectric prosthetic hand controlled via muscle activity in a user’s forearm. “The new gripper can’t replace all of the functions of existing prosthetic hands, but it could be used to supplement those other functions,” said Helen Huang, paper co-author and NC State’s Jackson Family Distinguished Professor in the Joint Department of Biomedical Engineering. “And one of the advantages of the kirigami grippers is that you would not need to replace or augment the existing motors used in robotic prosthetics. You could simply make use of the existing motor when utilizing the grippers.”
Yin, Huang, and their colleagues hope to eventually collaborate with robotic prosthetic makers, food processing companies, as well as electronics and pharmaceutical businesses to develop additional usages for their soft grippers.
This article was written by Andrew Paul from Popular Science and was legally licensed through the DiveMarketplace by Industry Dive. Please direct all licensing questions to legal@industrydive.com.
![]()