CLOSE
About Elements
私たち田中貴金属は、貴金属のリーディングカンパニー。
社会の発展を支える先端素材やソリューション、
それらが生まれた開発ストーリー、技術者たちの声、そして経営理念とビジョンーー
Elementsは、「貴金属を究める」をスローガンに、
より良い社会、豊かな地球の未来につながるインサイトを発信するWEBメディアです。

先端素材で社会の発展を支える、
田中貴金属の情報発信メディア






人間の血管を旅するロボット、開発進む
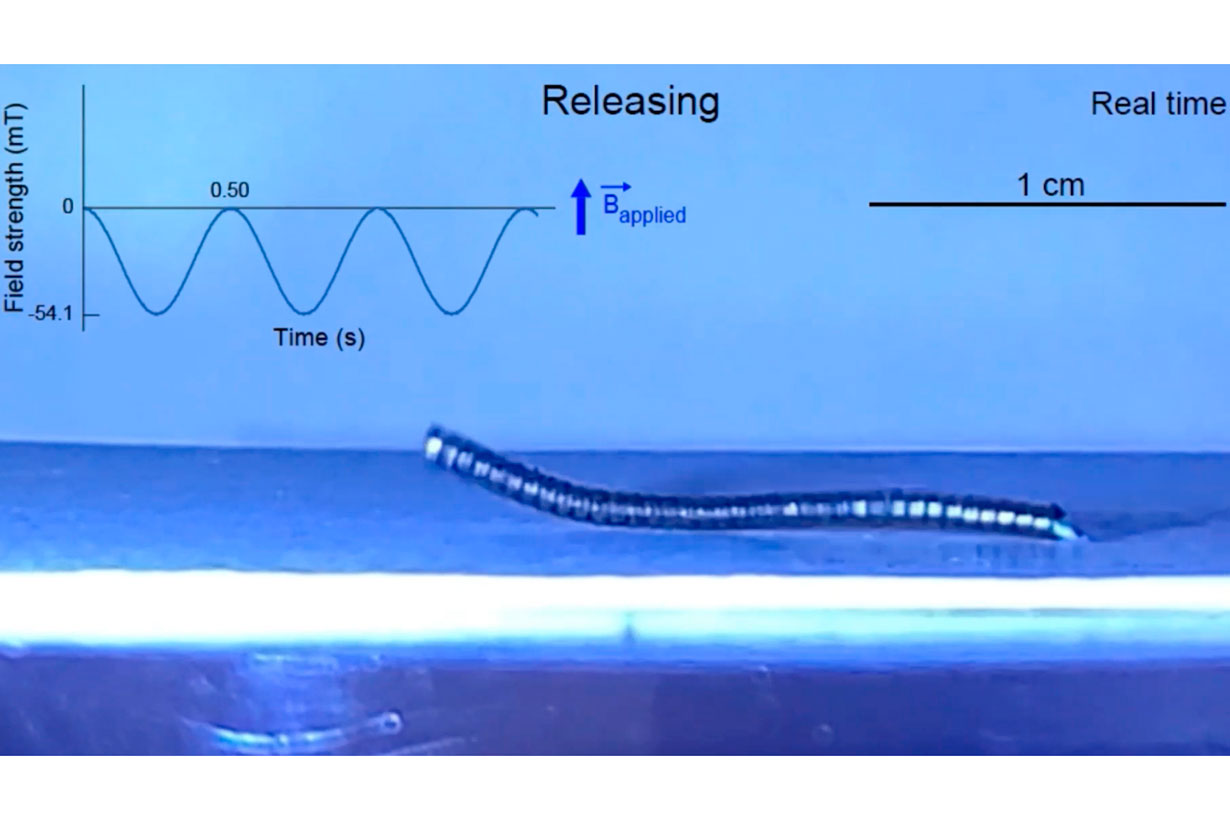
このソフトロボットは、戦略的に磁気を帯びさせることにより、3次元的な動きができる。
Image Credit: MIT / Ankeeva et al
マサチューセッツ工科大学(MIT)の研究チームが開発した、きゅうりにヒントを得た微小なソフトロボットは、単一の弱い磁場を利用して到達が難しい3次元環境を移動することができる。2023年6月に学術誌『Advanced Materials』に掲載されたオープンアクセス論文で詳述された、シャクトリムシのように動くソフトロボットは、ヒトの血管のような非常に狭い空間を移動させるのに極めて有望とされている。そのメカニズムは、螺旋(らせん)状のラバーポリマーが意図されたとおりに動くよう、戦略的に磁気を帯びさせるというものだ。
関連記事:Seals provided inspiration for a new waddling robot.
今回の最新型ワームボットが発表されるまで、運動性ソフトロボットの方向や角度を制御するには、磁場を動かす必要があった。論文の筆頭著者であるMITのポリーナ・アンキーエワ(Polina Ankeeva)教授(材料科学・エンジニアリング/脳・認知科学)はプレスリリースのなかで、「ロボットを移動させるためには、磁石を一緒に移動させなくてはなりません。ロボットを回転させたい時にも、やはり磁石を回転させる必要があります」と解説している。「非常に狭い環境のなかで操作したい場合、磁石を動かすことは十分に安全なソリューションではない可能性があります。単一の固定された装置で、サンプル全体に(一つの)磁場を作用させることが望ましいのです」
こうした理由から、MITのチームが採用した新たな設計は、他の多くのソフトロボットとは異なり磁化を均一に行うものではない。特定の領域と方向だけを磁化することで、単一の磁場によって「動作を生み出す磁力特性」が形成されると、MITのプレスリリースは説明している。
興味深いことに、研究チームの着想の源は、きゅうりの巻きひげ(茎を支えるため支柱などに巻きつこうとするコイル状の部位)だった。まずは、2種類のゴムの層を重ね合わせたあと加熱し、引き伸ばして細い繊維状にする。こうしてできた繊維が冷えると、片方のゴムが収縮し、もう片方のゴムが形状を維持することできゅうりの巻きひげとよく似た、きつく巻いた螺旋構造が形成される。最後に、ポリマーの螺旋内部に磁化可能な素材を通し、これをさまざまな動きや方向変化が生じるよう、戦略的に磁化する。
個々のロボットの磁化パターンはカスタマイズ可能なので、複数のソフトロボットそれぞれにマッピングを施すことができる。これらのソフトロボットを単一の均一な微弱磁場にさらすことで、異なる方向に移動させることができる。さらに、微小な磁場操作でロボットを振動させ、移動させることも可能だ。極小のミミズのような本体に物資を積み、指定の場所まで運ばせて、目的地で荷下ろしさせる「配達」も可能になる。柔軟な素材と比較的シンプルな操作性を備えたこうしたメカニズムは、患者の血管内を這い進んで患部に正確に薬剤を到達させるといった、医療の場面に応用可能だと研究チームは考えている。
この記事は、Popular ScienceのAndrew Paulが執筆し、Industry Dive Content Marketplaceを通じてライセンスされたものです。ライセンスに関するお問い合わせはlegal@industrydive.comまでお願いいたします。
![]()